

赛孚新品预告|碰撞测试假人中的“高富帅”—THOR-50M假人
作者:湖南赛孚汽车科技股份有限公司
浏览:
发表时间:2024-06-20 10:33:24
湖南赛孚汽车科技股份有限公司秉持“敢赛人先 深孚众望”这一文化核心,不断推动科技进步与创新,在技术研发、产品创新和服务质量上坚持与时俱进、精益求精,经过赛孚人的不懈努力,最新产品THOR-50M假人即将上市销售。
THOR-50M作为第四代汽车正面碰撞测试用第50百分位男性假人,和第三代假人Hybrid Ⅲ 50th男性假人有很大的差异,THOR-50M假人不仅提升了假人的生物仿真度、动态响应性能和测量的可重复性,同时拥有更多的脊椎部件,能模拟颈部肌肉运动和弯曲形态,它更接近人体结构,也更能反映出实际碰撞中人体受到的伤害和损伤机理。THOR-50M假人在完整装备后有157个独立的传感器通道用于测试使用,同时还有10个倾角传感器通道用于校准假人姿态,该假人主要应用于ENCAP、CNCAP等新车评价程序中。
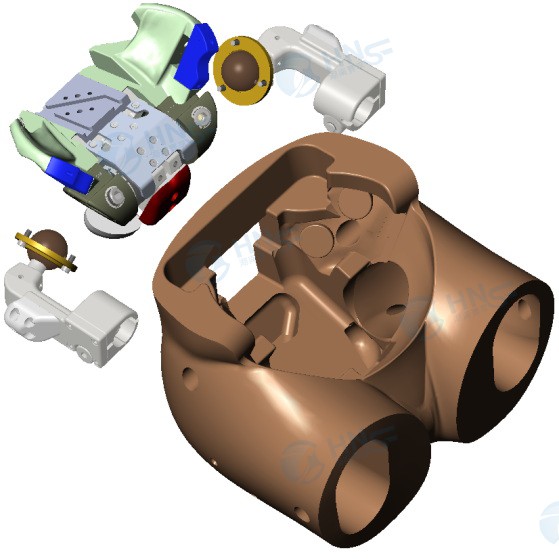
头部组件
THOR-50M假人头部组件包括头部铸件、头盖骨、内部安装板、仪器、仪器安装板和皮肤。在头部重心装有三个单轴加速度传感器,两对单轴加速度传感器,其中一对位于颅骨顶部的单轴加速度传感器和一个双轴倾斜传感器。假人面部结构有较大的变化,包括面部泡沫、面板和5个带冲击板的面部压力传感器或其替代件,面部压力传感器分布在眼部、脸颊和下巴处,面部泡沫安装在力传感器与头部皮肤内腔之间。

颈部组件
THOR-50M颈部组件由一系列铝盘和橡胶圆盘制成,使用环氧树脂模制在一起。橡胶圆盘呈椭圆形,为颈部组件提供所需的正面和侧面弯曲响应。压缩弹簧位于头骨的前部和后部,用于调节颈椎前后的预紧力。此外,橡胶软止动块连接在颈部的底部,以在前后运动中实现所需的弯曲特性。
颈部组件的仪器包括一对微型测力传感器,用于测量前后弹簧位置的压力,六轴测力传感器位于颈部的顶部和底部,用于测量这些位置产生的力和力矩,以及一个用于髁销的旋转电位计,用于测量头部和颈部顶部之间的相对旋转。

胸部组件
THOR-50M假人的胸部组件是一个集成组件,包括肩部、脊柱、胸腔和腹部组件。
THOR-50M胸部肋骨逐步向下倾斜,这更贴近真人肋骨的形状,在胸椎处增设了上胸椎屈曲关节这样一个橡胶结构,这增加了胸椎的柔韧度,在腰椎上方增加腰椎变距调节机构,可调节脊椎角度实现坐姿时假人上躯干“超前倾”、“前倾”、“中立”和“直立”的状态。胸部组件上的力在T12位置使用五轴测力传感器测量(该测力传感器被视为脊柱组件的一部分)。三向加速度传感器位于脊柱上,靠近胸部重心的垂直高度,用于测量沿三个主轴的加速度。单轴加速度传感器位于胸骨板上,用于测量该位置的加速度。其他仪器包括T1三向加速度传感器、T12三向加速度传感器、上腹部加速度传感器和四个倾角传感器,以及采用4个3DIRTRACC传感器测取胸部压缩量。

臀部组件
THOR-50M的臀部组件骨架可从皮肤内腔拆出,该组件由一个基座模块和两个铝翼组成,细分为盆骨底部模块、盆骨尾骨、左髂骨、右髂骨、左髋臼、右髋臼等部分。其设计近似于人体骨盆结构的几何形状。
肩部和手臂组件
THOR-50M假人的肩部组件包括将手臂连接到脊柱和胸部组件的机械部件。肩部设计成模拟人体肩部/锁骨复合体的几何形状和运动状态。一个独立的锁骨连接件用于在肩部组件和安全带约束系统之间提供更逼真的生物相互作用。这种独立的锁骨可以直接加载胸骨和胸腔,以产生更像人类的加载条件。同时开发了一对专用的上手臂,并定制了假人夹克,以允许不受阻碍地增加肩部的活动范围。下手臂和手掌则是模拟人体关节活动范围。

大腿组件
THOR-50M的大腿组件增加了橡胶材质的大腿压缩件,大腿压缩件具有吸能减震作用,相当于增加了大腿骨架的柔韧性,提高了大腿骨架的生物逼真度,并在膝盖(美版)的两侧增加了膝盖关节盖。在股骨的下端有一个标准的六轴股骨测力传感器,连接股骨组件膝盖。

小腿组件
THOR-50M的小腿组件(美版)在胫骨上端处增加了小腿橡胶衬套,小腿橡胶衬套具有吸能减震作用,相当于增加了小腿骨架的柔韧性,提高了小腿骨架的生物逼真度。THOR-50M的脚踝(美版)结构复杂很多,可安装绕X轴、绕Y轴和绕Z轴的角度传感器,并增加了跟腱结构,可安装跟腱力传感器。

传感器分布
部件 | THOR-50M传感器配置(数量*通道) |
头部 | 头部质心加速度Axyz,3*1 头部加速度(顶部、后方、侧向),3*2*1 头部角速度,3*1 面部力Fx,5*1 头部倾角θxy,1*2 |
颈部 | 颈部角度,1*1 上&下颈部力,2*1*6 颈椎倾角θxy,1*2 |
上躯干 | T1加速度,3*1 中间胸骨加速度,1*1 上腹部加速度,1*1 T6加速度,3*1 T12加速度,3*1 T4角速度,3*1 3D IR-TRACC(上胸,左/右),2*3 3D IR-TRACC(下胸,左/右),2*3 3D IR-TRACC(腹部,左/右),2*3 锁骨力(左/右)Fx、Fz,2*1*4 胸椎力Fxyz、Mxy,5*1 胸椎倾角θxy,1*2 腰椎倾角θxy,1*2 |
臀部 | 骨盆加速度,3*1 骨盆角速度,3*1 髂骨力(左/右)Fx、My,2*1*2 髋臼力(左/右)Fxyz,2*1*3 骨盆倾角θxy,1*2 |
手臂 | 上手臂力(左/右)Fxyz、Mxyz,2*1*6 |
大腿 | 大腿力(左/右)Fxyz、Mxyz,2*1*6 膝盖位移(左/右),2*1*1 |
小腿 | 胫骨加速度(左/右)Axy,2*2*1 足部加速度(左/右),2*3*1 脚踝角度(左/右),2*3*1 上胫骨力(左/右)Fxyz、Mxy,2*1*5 下胫骨力(左/右)Fxyz、Mxy,2*1*5 跟腱力(左/右)Fz,2*1*1 |
合计通道数 | 167 |
目前赛孚正在开发THOR-50M的工作,已经开发了头、颈、左/右上手臂、左/右下手臂、左/右手、左/右大腿、左/右膝盖、左/右小腿(欧版)、左/右足(欧版),实物如下图所示。

首页 | 产品服务 | 碰撞测试实验室系统 | 服务支持 | 关于我们 | 新闻中心 | 联系我们 |
电 话:0731 - 8448-8719
地 址:湖南省长沙市岳麓区学士路602号
E-mail:server@hnsaf.com
Copyright © 2023 湖南赛孚汽车科技股份有限公司 湘ICP备19026141号-1

扫码关注我们
